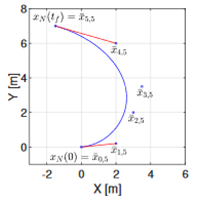
Cichella, V., Kaminer, I., Walton, C., Hovakimyan, N., & Pascoal, A. M. (2020). Optimal Multi-Vehicle Motion Planning using Bernstein Approximants. IEEE Transactions on Automatic Control.
Assistant Professor, Electrical and Computer Engineering/Mathematics
Cichella, V., Kaminer, I., Walton, C., Hovakimyan, N., & Pascoal, A. M. (2020). Optimal Multi-Vehicle Motion Planning using Bernstein Approximants. IEEE Transactions on Automatic Control.