- Consistent numerical methods for state and control constrained trajectory optimisation with parameter dependency
Walton, C., Kaminer, I., & Gong, Q. (2020). International Journal of Control, 1-11.
- Optimal Multi-Vehicle Motion Planning using Bernstein Approximants
Cichella, V., Kaminer, I., Walton, C., Hovakimyan, N., & Pascoal, A. M. (2020). Optimal Multi-Vehicle Motion Planning using Bernstein Approximants. IEEE Transactions on Automatic Control.
- Partial Observability Analysis of an Adversarial Swarm Model
Gong, Q., Kang, W., Walton, C., Kaminer, I., & Park, H. (2020). Journal of Guidance, Control, and Dynamics, 43(2), 250-261.
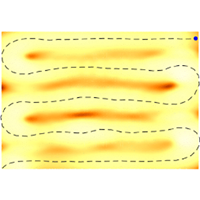
- Achievable Endurance of Hybrid UAV Operating in Time-Varying Energy Fields
Dobrokhodov, V., Jones, K. D., Walton, C., & Kaminer, I. I. (2020). In AIAA Scitech 2020 Forum (p. 2197).
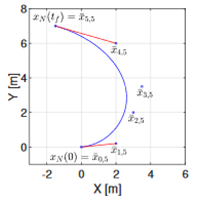
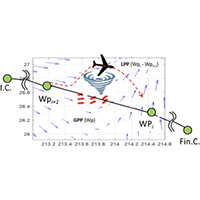
- Energy-optimal Trajectory Planning of Hybrid Ultra-Long Endurance UAV in Time-Varying Energy Fields
Dobrokhodov, V., Jones, K. D., Walton, C., & Kaminer, I. I. (2020). In AIAA Scitech 2020 Forum (p. 2299).
Assistant Professor, Electrical and Computer Engineering/Mathematics